Решение задач → Задачи по теоретической механике с решениями
Плоский механизм манипулятора переносит груз из одного положения в другое по траектории, определяемой полярными координатами центра схвата rC=rC(t), φC=φC(t). Найти:
1) законы изменения углов ψ1 и ψ2, отрабатываемых соответствующими приводами, обеспечивающие выполнение заданной программы;
2) законы изменения этих углов, если груз перемещается по прямой, параллельной оси y, отстоящей от нее на расстоянии a по закону y=s(t), где s-заданная функция времени t.
Для просмотра изображения в полном размере нажмите на него 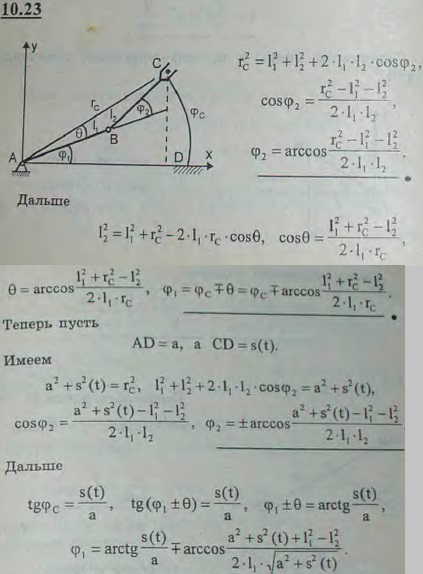 |
Решение задачи 10.23
(Мещерский И.В.)
| << Предыдущее
|
Следующее >>
|
|
10.21 По заданным уравнениям движения точки в декартовых координатах x=R cos2 (kt/2), y=(R/2) sin (kt), z=R sin (kt/2) найти ее траекторию и уравнения движения в сферических координатах.
|
10.22 Точка участвует одновременно в двух взаимно перпендикулярных затухающих колебаниях, уравнения которых имеют вид x=Ae-ht cos(kt + ε), y=Ae-ht sin(kt + ε), где A > 0, h > 0, k > 0 и ε-некоторые постоянные. Определить уравнения движения в полярных координатах и найти траекторию точки.
|
11.1 Точка совершает гармонические колебания по закону x=a sin kt. Определить амплитуду a и круговую частоту k колебаний, если при x=x1 скорость v=v1, а при x=x2 скорость v=v2.
|
11.2 Длина линейки эллипсографа AB=40 см, длина кривошипа OC=20 см, AC=CB. Кривошип равномерно вращается вокруг оси O с угловой скоростью ω. Найти уравнения траектории и годографа скорости точки M линейки, лежащей на расстоянии AM=10 см от конца A.
|
|