Найти задачу можно, введя ее условие. Если с первого раза не нашли решение на нужное
готовое задание, попробуте поиск по другим похожим ключевым фразам из ее условия
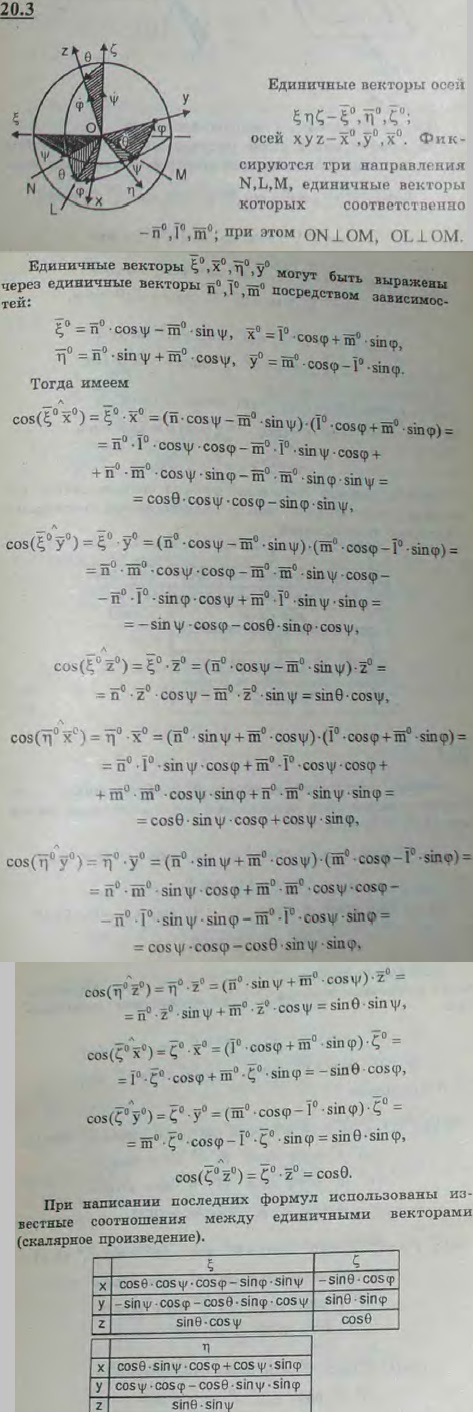
Положение твердого тела, имеющего одну неподвижную точку O, определяется тремя углами Эйлера: углом прецессии ψ, углом нутации θ и углом собственного вращения φ (см. рисунок). Определить направляющие косинусы подвижной системы отсчета Oxyz.
Для просмотра изображения в полном размере нажмите на него