Найти задачу можно, введя ее условие. Если с первого раза не нашли решение на нужное
готовое задание, попробуте поиск по другим похожим ключевым фразам из ее условия
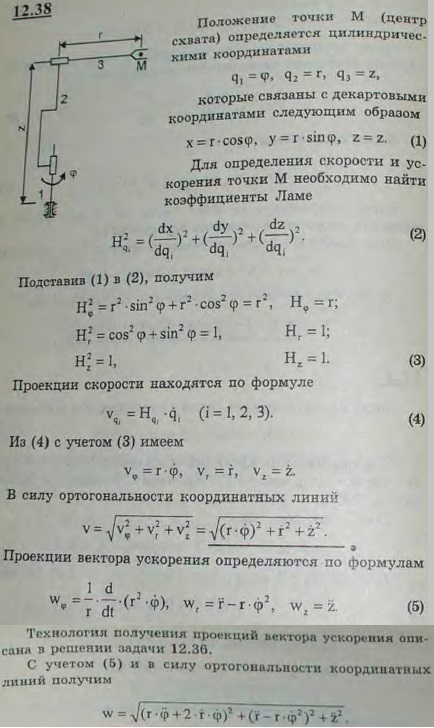
Механизм робота-манипулятора состоит из поворотного устройства 1, колонны для вертикального перемещения 2 и выдвигающейся руки со схватом 3. Найти скорость и ускорение центра схвата при заданных φ(t), z(t), r(t).
Для просмотра изображения в полном размере нажмите на него